

Conexiones de la placa SKR v1.3 - Guía rápida
El mundo de la impresión 3D se encuentra en un momento de desarrollo frenético, impulsado en gran parte por la comunidad Maker y el movimiento Open Source. Uno de los grandes avances realizados ha sido la adopción de los procesadores de 32 bits para el control de nuestras impresoras 3D.
Estos procesadores de 32 bits ofrecen muchas ventajas sobre los procesadores de 8 bits:
- Menor coste en producciones a gran escala.
- Mayor capacidad de procesamiento.
- Velocidades de respuesta superiores.
- Capacidad muy superior para añadir nuevas y potentes funciones.
Y una única desventaja, la necesidad de adaptar un programa inicialmente diseñado para 8 bits. Por suerte esto está ya casi completado por parte del equipo de Marlin, las versiones de Marlin a día de hoy (2020) tienen muy pocos bugs para algunos procesadores de 32 bits.
Dentro de todas las placas de 32 bits que han salido al mercado la SKR 1.3 tiene muchas ventajas que la han convertido en un éxito:
- Bajo coste. Apenas superior al equivalente con Ramps.
- Calidad de construcción excelente por el precio.
- Compatibilidad con 24v.
- Conexiones más que suficientes para la gran mayoría de impresoras 3D, con posibilidad de expansión para duplicar los motores de un eje a partir de sencillos módulos.
- Todas estas ventajas se presentan además en un formato compacto que se puede instalar en muchos modelos de impresoras 3D sin necesidad de apenas modificaciones.
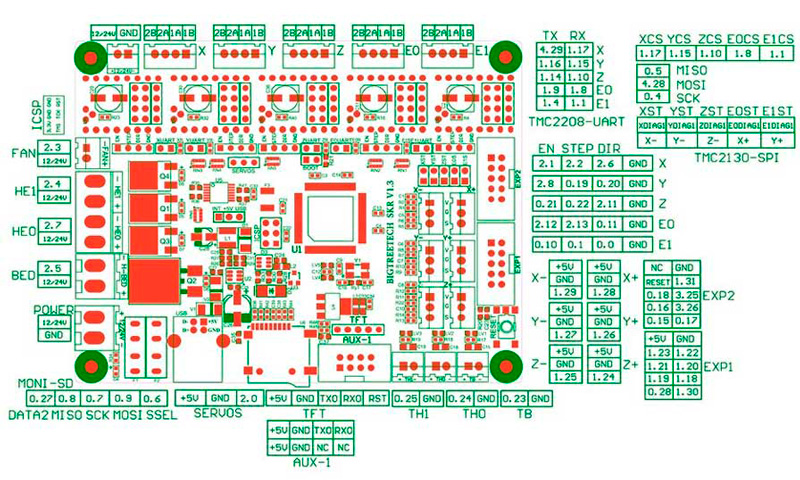
CONEXIONES:
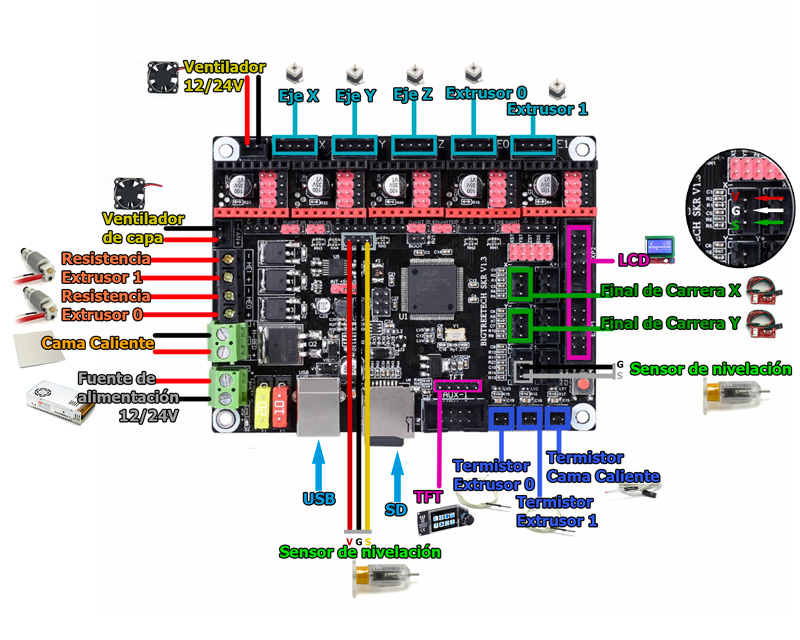
Alimentación:
La fuente de alimentación provee la energía a nuestra máquina. Podemos utilizar una la fuente de 12 o 24 V, eligiendo los componentes que correspondan para la misma tensión. La fuente alimenta con una línea bipolar a la clema, siendo muy importante conectar la polaridad correctamente.
Resistencias:
Las conexiones servirán para:
HE0: Resistencia del Hotend 0 (no tiene polaridad)
HE1: Resistencia del Hotend 1 (no tiene polaridad)
H-BED: Cama Caliente (no tiene polaridad)
Ventilador 12/24V:
Aquí podemos conectar el ventilador de la electrónica o hotend (tiene polaridad, en caso de conectarlo erróneamente podríamos dañar el ventilador).
Este ventilador estará siempre encendido.
Ventilador de capa:
Tiene polaridad, en caso de conectarlo erróneamente podríamos dañar el ventilador
Este ventilador estará controlado por el firmware.
Motores Paso a Paso:
Esta electrónica requiere de cuatro o cinco controladores dependiendo de si nuestra impresora 3D tenga uno o dos extrusores. Siendo tres para cada uno de los tres ejes de la impresora y otro para cada extrusor. Podemos ver su colocación en el esquema junto a la conexión de los motores.
En el caso del eje Z, normalmente las impresoras 3D utilizan dos motores, sólo encontramos en esta placa un conector. Para poder conectar dos, podemos utilizar este módulo para conectar los dos motores en paralelo.
Habrá que tener en cuenta también el orden del cableado de los motores, que dependerá del modelo y del fabricante.
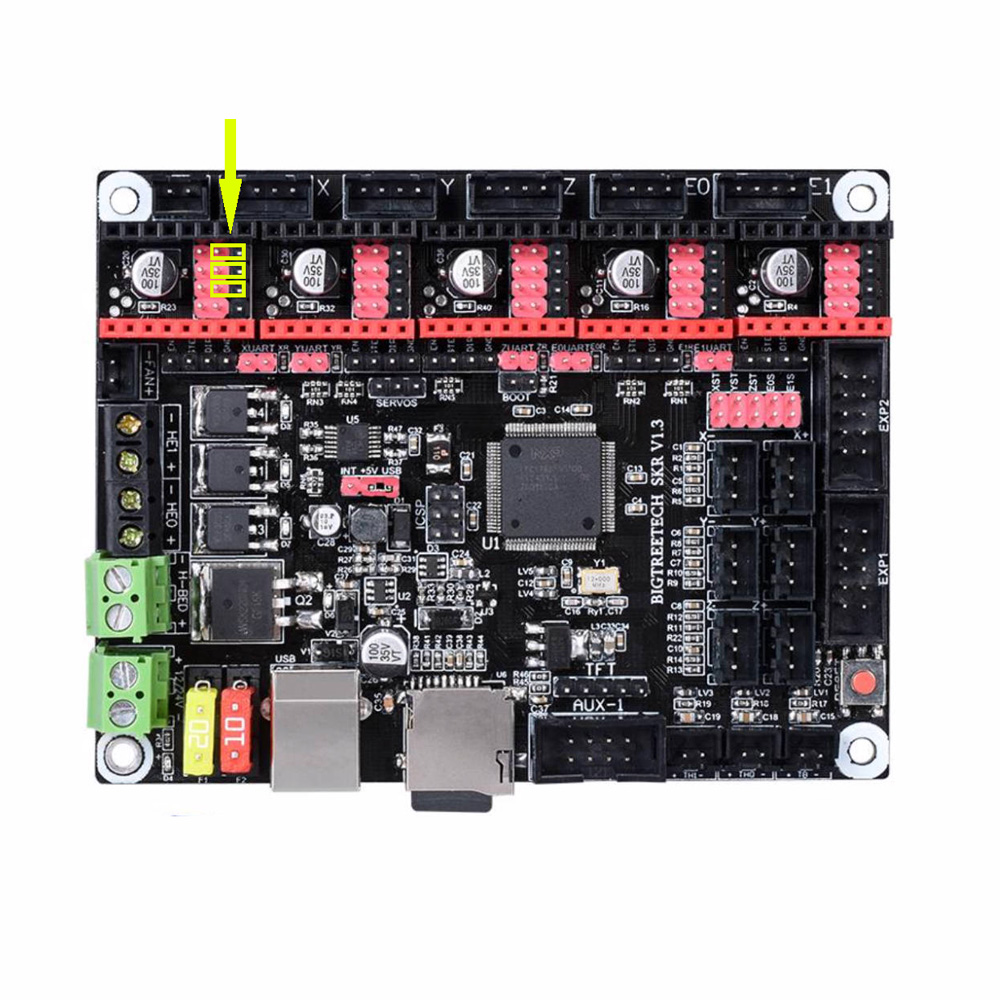
Si utilizamos los controladores STEP/DIR como los A4988 o DRV8825, tendremos que colocar tres jumpers en los pines según vemos en la imagen:
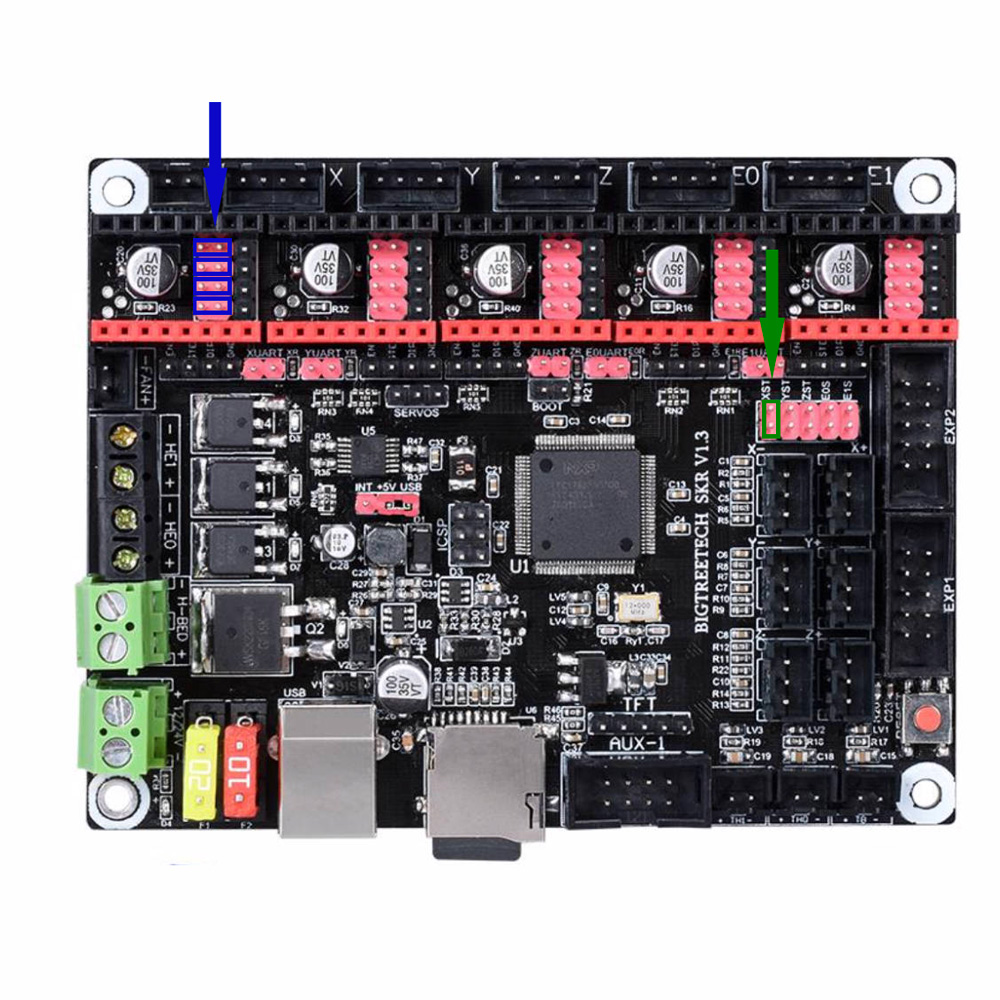
Si utilizamos controladores con SPI, como los TMC2130 SPI, tendremos que colocar jumpers en los pines de la izquierda como vemos en este caso en los pines para el eje X. Además, si no vamos a utilizar finales de carrera ya que no son necesarios, tendremos que poner otro jumper en los pines XST señalados con la flecha verde (en este caso de jemplo para el motor del eje X).
De esta forma, conectaremos el pin DIAG1 del controlador con el pin correspondiente en la conexión del final de carrera. Es Importante no conectar un final de carrera en el eje donde hayamos habilitado esta función ya que no se puede usar “Sensorless Homing” y finales de carrera físicos simultáneamente.
Si vamos a utilizar controladores UART, como los TM2208, TMC2209 o TMC2225 necesitamos poner un jumper en los pines para esta conexión de cada controlador que utilicemos. En esta imagen señalamos los pines del extrusor:
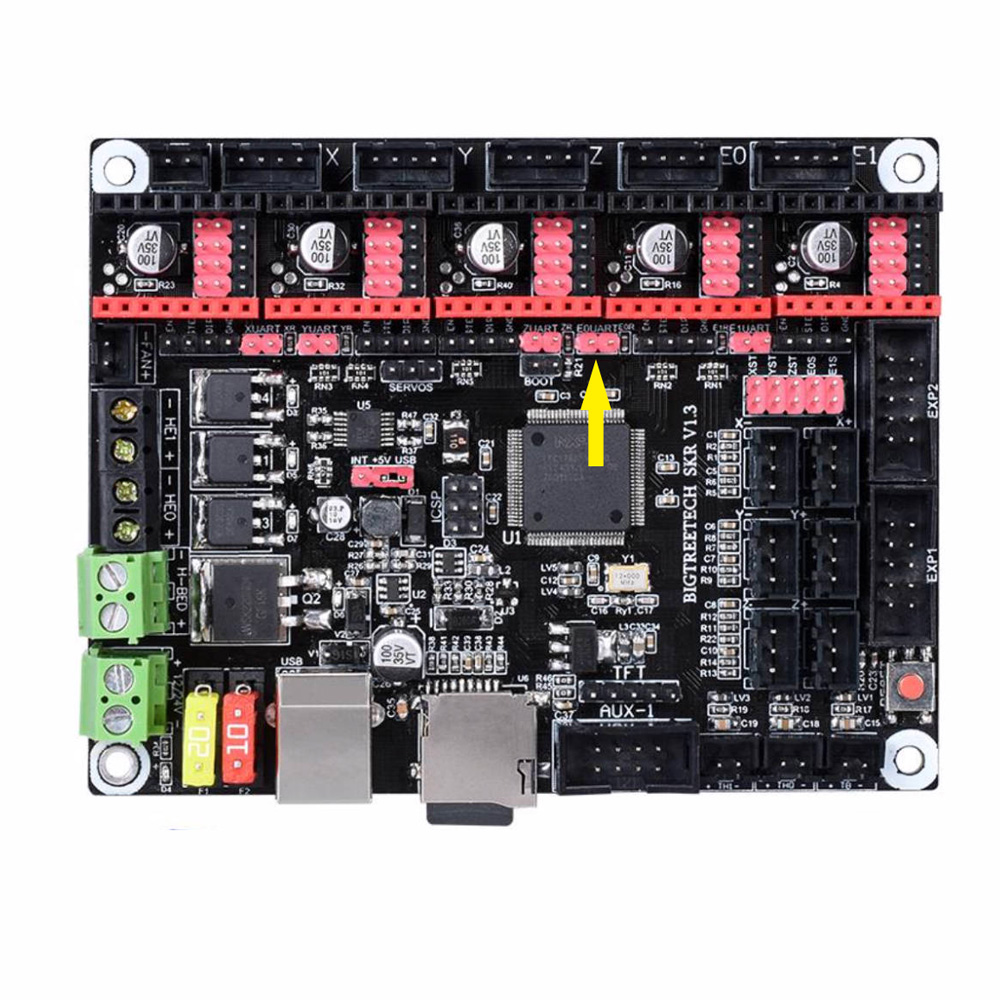
Serán solo esos los jumpers que se utilicen, no se ponen jumpers en los pines bajo los controladores.
Finales de Carrera:
Dependiendo de los controladores que utilicemos, serán necesarios o no los finales de carrera, ya que con la comunicación SPI los controladores “sabrán” cuando se salta pasos la impresora e identifica esto como final del recorrido (bien configurado).
Podemos ver la colocación del final de carrera de X y de Y. En el esquema hemos situado la conexión para una configuración de Xmin y Ymin, si queremos configurarlo en el máxima, la conexión es la de la derecha según podemos ver que está indicado en la placa.
El de Z estaría situado justo debajo, pero en este caso vamos a utilizar un sensor de nivelación automática.
Con los finales de carrera, es muy importante que estén conectados correctamente, ya que si se conectan invirtiendo el orden dañaremos la placa.
Sensor de nivelación automática:
Los sensores de nivelación automática, como 3DTouch, tienen dos conexiones, una corresponde a la función de final de carrera de Z y la otra a la función de autonivelado conectado en el puerto para Servos.
Para realizar las conexiones, simplemente para cada cable o línea tenemos que preparar el cable con el conector dupont.
Como vemos, el cable negro y blanco (señal) se conecta en la posición del final de carrera de Zmin.
Igual que en los finales de carrera, si queremos configurarlo para Zmax, sería la conexión de la derecha como vemos indicado en la placa.
El otro cable, se conecta en la posición de Servo, con el orden del esquema (Señal, 5V, Tierra).
Termistores:
Podemos ver en el esquema la posición de los termistores para el Extrusor 0, Extrusor 1 y Cama caliente (no tienen polaridad).
LCD:
Si vamos a utilizar las pantallas habituales (12864 o 2004), utilizaremos la conexión que vemos a la derecha en el esquema.
Si vamos a utilizar pantallas como las TFT24 V1.1 o TFT35 V3.0 tendremos que utilizar dicha conexión para la función táctil. Si queremos utilizarla con la interfaz de Marlin, sólo necesitamos la conexión de la derecha. Si sólo queremos la interfaz táctil, sólo necesitamos la conexión TFT. Para poder cambiar de una a otra, tendremos que conectar ambas.
USB:
Podemos ver su colocación en el esquema.
SD:
Podemos ver su colocación en el esquema.
Modificar el esquema de pines:
Como Marlin es completamente abierto, podemos intercambiar los pines para por ejemplo controlar un ventilador adicional si sólo vamos a usar un fusor, etc. Para ello podemos modificar el archivo:
\Marlin\src\pins\lpc1768\pins_BTT_SKR_V1_3.h
En esta imagen se muestra la posición de todos los pines disponibles de la placa:
3 Comentario(s)
Tenéis el Marlin? De este tipo de placas de 32bits para la p3 steel?
Próximamente tendremos una nueva 3DSteel con una placa 32 bits y su correspondiente firmware público :)
Thermistor Extruder 0, Extruder 1 are back to front on your marked up drawing?
Cheers Andrew
Very observant, thanks for pointing it out, it's true, the 0 and 1 are interchanged in the first drawing. The inscription on the plate is correct. Sorry for the inconveniences.
Can the SKR V1.3 have an additional potentiometer added to control the speed on four stepper motors in the case of controlling the feed rate on a cnc router?
Dejar un comentario