

Quizás a simple vista esta actualización pueda parecer una actualización menor, ya que visualmente los cambios no son muy visibles, pero en realidad se trata de una gran actualización, ya que pasamos de 8 a 32 bits, y de 12 a 24 voltios. Además, actualizamos los controladores del TMC2130 al TMC2209 y la cama de una Mk3 de aluminio a una cama magnética con imanes insertados.
Al igual que en la anterior actualización, vamos a explicarla de forma modular (dentro de lo posible), para que el usuario pueda actualizarla parcialmente si lo desea.
Si tienes la P3Steel y deseas actualizar a 3DSteel V2 en una misma actualización puedes usar como referencia lo indicado en este artículo:
https://www.hta3d.com/es/blog/tutorial-actualizacion-p3steel-3dsteel
Y combinarlo con el presente.
Electrónica con placa SKR y controladores TMC2209
La placa SKR es una de las placas 32 bits más usadas, debido a sus grandes prestaciones y su versatilidad. Junto a los controladores TMC2209 forman un conjunto muy eficiente y de alto rendimiento.
La calidad de construcción, sus conexiones, y la posibilidad de ser usada a 24V convierten esta combination en una solución muy equilibrada y preparada para el futuro.
Versión SKR 2:
Versión SKR 1.4: Temporalmente no hay stock a nivel mundual de la SKR 1.4 (ni placas con procesador LPC), por lo que este enlace no funcionará hasta que el stock vuelva:
Aquí tienes el pack correspondiente.
Si lo deseas puedes aprovechar los controladores TMC2130, ya que también son compatibles, sólo hay que tenerlo en cuenta al actualizar el firmware y al configurar los jumpers que nos encontramos en la placa.
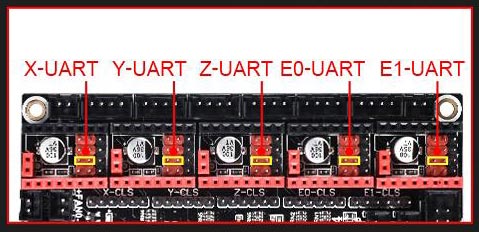
Esquema de colocación de jumpers para configuración UART (TMC2209):
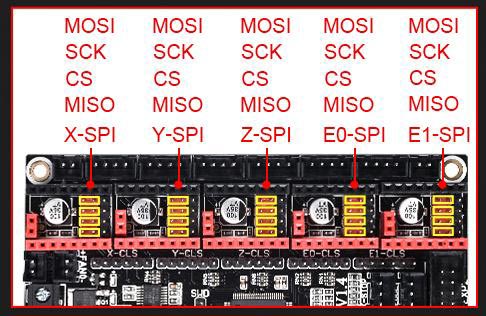
Esquema de colocación de jumpers para configuración SPI (TMC2130):
Sí, se pueden combinar, y puedes instalar por ejemplo los TMC2209 sólo para el eje X e Y.
Incluso se puede combinar con controladores DRV8825 para quien actualice desde P3Steel, en cuyo caso este es el esquema para los controladores STEP/DIR, no se recomiendan usar controladores antiguos para X e Y para mantener la compatibilidad con las piezas impresas:
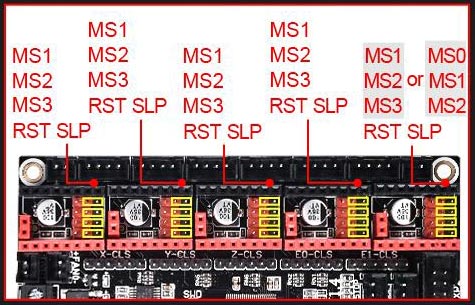
Esquema de colocación de jumpers para configuración STEP/DIR (DRV8825):
Si el controlador dispone de pin para Sensorless homing por la parte baja del mismo, lo reconocerá automáticamente, si no, habría que usar un pequeño cable desde este pin hasta la señal del final de carrera correspondiente.
Fuente de alimentación 24V con cama caliente magnética, resistencia y ventiladores
Es importante señalar, que los 24V no son compatibles con Ramps 1.6+, ya que las placas Mega no están diseñadas para soportar este voltaje, se quemarán. Es imprescindible cambiar la placa a la SKR. Sin embargo la SKR puede funcionar a 12V.
Esta actualización es algo que parece difícil de apreciar a simple vista, pero al trabajar a 24V la impresora obtiene las siguientes ventajas:
- Mayor eficiencia en todos sus componentes electrónicos:
- Cama caliente.
- Resitencia del hotend.
- Ventiladores.
- Controladores.
- Motores.
- Incluso la propia fuente es más eficiente y se calienta menos.
- Mayor seguridad en las conexiones y cables, ya que estos se calientan aproximadamente un 75% menos, evitamos en gran medida problemas de calentamiento en las clemas.
- Los mosfets se calientan mucho menos, por la reducción de corriente. Este ha sido históricamente un problema en las Ramps 1.4 y placas antiguas.
Hemos preparado estos dos packs:
- Pack con ventiladores normales.
- Pack con ventiladores con rodamientos, son más eficientes, vibran menos, hacen menos ruido y duran mucho más.
Se podrían utilizar las camas Mk3, siempre y cuando se haga la adaptación a 24V en los puntos de soldadura del PCB (según la partida de fabricación hay camas convertibles y otras no). Esto se puede comprobar simplemente mirando por la parte inferior, si tiene 3 grandes puntos de soldadura es la versión que se puede adaptar.
Otros cambios:
Componentes del Hotend.
En la 3DSteel V2 ofrecemos de serie la mejor versión disponible hasta la fecha, es decir, la versión bimetal. Esto no es estrictamente necesario, ya que funcionará también bien con versiones más básicas, si desdeas actualizar este componente puedes hacerlo con este pack.
Es recomendable tener algo de teflón disponible, en la versión bimetal usamos el teflón de DI:1.9 para que de esta forma el movimiento del extrusor sea lo más preciso posible.
Eje X - Z
Se han actualizado las piezas del eje X añadiendo dos topes que facilitan la nivelación del eje, y dos poleas para mover fácilmente de forma manual los husillos del eje Z. Usando Marlin 2.0.7 o superior se puede hacer también de forma automática desde el LCD o usando el código G34.
Puedes descargar las piezas de este enlace.
También puedes descargar un pequeño tope que se puede añadir sobre las varillas para poder aprovechar las piezas de la 3DSteel V1.
O comprar las piezas impreas.
Eje Y
Se han modificado las piezas impresas para que los tornillos de las correas queden en la parte inferior, de esta forma se puede cambiar la correa con facilidad cuando sea necesario.
Puedes descargar las piezas impresas usando este enlace.
O comprar el artículo con las piezas impresas por nosotros.
Cambios en el firmware
Tomamos como punto de partida el hardware de nuestra 3DSteel V2, si lo actualizas todo sólo hay que copiar el archivo "firmware.bin" de la última versión disponible dentro de la tarjeta SD, al ejecutarse por primera vez borrará la memoria anterior, por lo que habrá que realizar de nuevo los ajustes de calibración. En los siguientes enlaces puedes encontrar lo necesario:
Si decides no hacer alguna de estas actualizaciones, y por lo tanto actualizar parcialmente la impresora, has de compilar el nuevo firmware en base a los cambios que no se haga.
Mantener el voltaje a 12V
En configuration_adv.h:
#define CHOPPER_TIMING CHOPPER_DEFAULT_12V
De esta forma los controladores funcionarán a 12V correctamente, no actualizarlo puede dañarlos.
Mantener los controladores TMC2130, en lugar de los TMC2209.
Esto puede ser una buena para economizar en la actualización, para ello hay que configurar las siguientes líneas:
En configuration.h:
#define X_DRIVER_TYPE TMC2130
#define Y_DRIVER_TYPE TMC2130
#define Z_DRIVER_TYPE TMC2130
#define E0_DRIVER_TYPE TMC2130
Cada controlador se define por separado, por lo que se pueden también mezclar.
Al cambiar de controlador hay que ajustar también la sensibilidad de la función Sensorless homing:
#define X_STALL_SENSITIVITY 8 #define X_STALL_SENSITIVITY 8
La sensibilidad de los TMC2209 va en una escala de 0 a 255, mientras que la de los TMC2130 va en una escala del -64 al 63, por lo que el valor usando los TMC2130 suele ser mucho más bajo. Esto se puede ajustar una vez está funcionando la impresora 3D.
Para usar el sensorless homing de los TMC2130 hay que cambiar la lógica de los finales de carrera de "false" a "true":
#define X_MAX_ENDSTOP_INVERTING true
#define Y_MAX_ENDSTOP_INVERTING true
Y si activamos al menos un controlador TMC2130, hay que activar también la conexión SPI de la placa:
#define TMC_USE_SW_SPI
"Z Gantry Calibration"
Si no deseas cambiar las piezas de Z ni colocar los pequeños añadidos es mejor que deshabilites esta opción presente en configuration_adv.h ya que en caso contrario la impresora intentará aplastar los cables si se ejecuta por error:
//#define MECHANICAL_GANTRY_CALIBRATION
Nuestra recomendación en este sentido es que coloques al menos los pequeños añadidos ya que es una función muy cómoda y útil.
Una vez hechos todos estos pasos, para hacer todas las conexiones de la placa puedes seguir el esquema de conexión de nuestro tutorial de montaje número 3, a partir del paso 5.
Una vez lo tengas todo instalado se recomienda hacer las comprobaciones y calibraciones de este tutorial.
Uno de los puntos que hay que revisar con especial atención es la dirección de los motores, ya que hay diferencias en la dirección entre los diferentes controladores que se pueden emplear (TMC2130, TMC2209 y DRV8825), en caso de ser necesario se puede dar la vuelta a la clavija en su conexión en la placa, o modificar estas líneas, cambiando entre "true" y "false" según sea necesario:
// Invert the stepper direction. Change (or reverse the motor connector) if an axis goes the wrong way. #define INVERT_X_DIR true #define INVERT_Y_DIR true #define INVERT_Z_DIR true // @section extruder // For direct drive extruder v9 set to true, for geared extruder set to false. #define INVERT_E0_DIR false
Si has llegado hasta aquí, espero que hayas tenido éxito en la actualización, si tienes alguna dificultad o problema durante el proceso por favor no dudes en contactar con nosotros.
Artículos Relacionados










2 Comentario(s)
Links are not working for:
Pack with common fans.
Pack with ball bearing fans,
This is because we are out of stock of one or more products in the pack. We are working to have stock as soon as possible. Sorry for the inconvenience.
Why did you disable STEALTHCHOP in your 2.0.7.2 firmware for this SKR v1.4 board and TMC2209 ?
Yes by default because TMC2209 are silent enough in standard mode, STEALTHCHOP can be turned on in LCD menu anyway, also edit current and sensorless homing sensibility.
Dejar un comentario